[Arduino Project – Gimbal] кё°кө¬м¶ңл Ҙ вҖ“ 3D н”„лҰ°н„° вҖ“
...
1. л¶Җн’Ҳкө¬мһ…
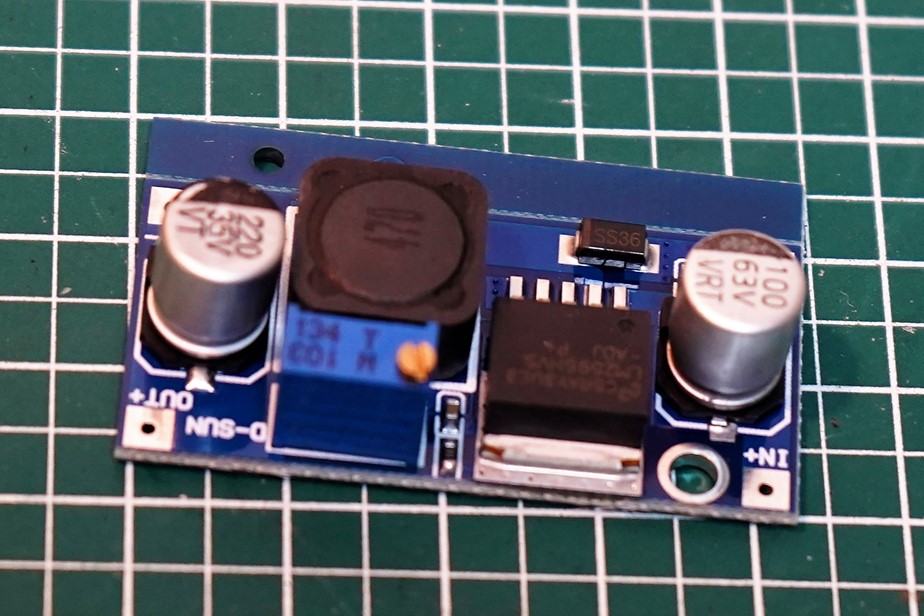
2. кё°кө¬м¶ңл Ҙ
3. н”„лЎңк·ёлһЁл°Қ
4. н…ҢмҠӨнҠё
5. мҡ©мҡ© л°Ҹ кі лҸ„нҷ”
мһҗмқҙлЎң к°ҖмҶҚ м„јм„ң мһ…л Ҙмқ„ л°ӣм•„ м •ліҙлҘј мқҪкі м„ңліҙлӘЁн„° м¶ңл ҘмңјлЎң к· нҳ•мқ„ л§һ추лҠ” м№ҙл©”лқј м§җлІҢмқ„ л§Ңл“ңлҠ” кІғмқҙ лӘ©м Ғмһ…лӢҲлӢӨ. м„ңліҙ лӘЁн„°мқҳ мЎ°мһ‘ м •л°ҖлҸ„к°Җ мўӢм§Җ м•Ҡм•„м„ң м •л°Җн•ҳкІҢ к·ёлҰ¬кі л¶Җл“ңлҹҪкІҢ лҸҷмһ‘ м•Ҳлҗ кІғмқҙлқјлҠ” кІғмқҖ мҳҲмғҒмқ„ н•ҙлҙ…лӢҲлӢӨ. мҡ°м„ 1м°Ём ҒмңјлЎң мҷёкөӯ м•„л‘җмқҙл…ё н”„лЎңм қнҠё мӮ¬мқҙнҠёлҘј к·ёлҢҖлЎң кө¬нҳ„н• кІғмһ…лӢҲлӢӨ.
м°ёкі URL : https://howtomechatronics.com/projects/diy-arduino-gimbal-self-stabilizing-platform/
мөңлҢҖн•ң лӢЁкё°к°„м—җ лӘ©н‘ң лӢ¬м„ұмқ„ н•ҳкі 5лӢЁкі„ кі лҸ„нҷ”м—җм„ң нҷ•мһҘмқ„ н• мғқк°Ғмһ…лӢҲлӢӨ. вҖ” 진н–ү мғҒнҷ©м—җ л”°лқјм„ң лӢ¬лқјм§Ҳ мҲҳ мһҲмҠөлӢҲлӢӨ.

* кё°нҢҗ кі м • мҠӨнғ л“ң 2
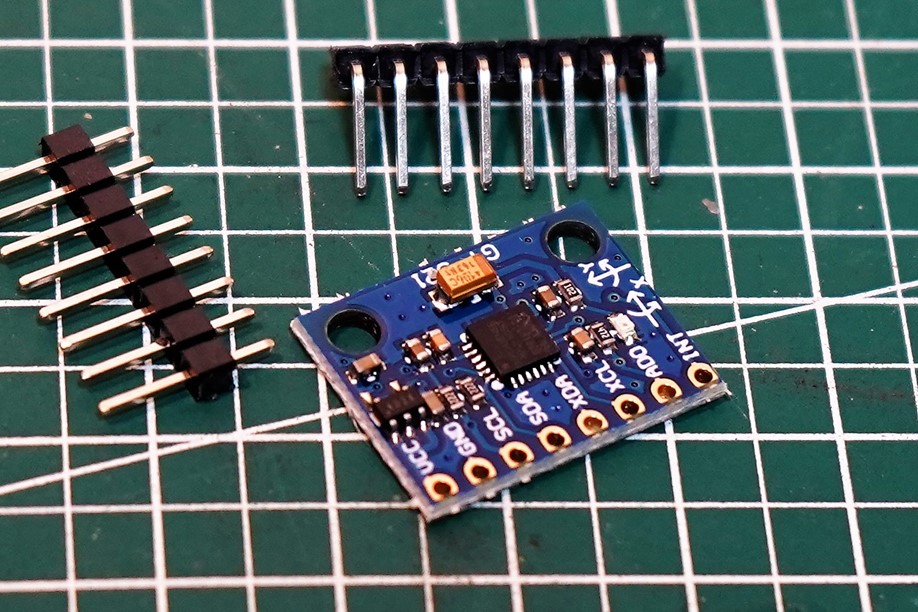

Arduino Project, Gimbal, л¶Җн’Ҳкө¬мһ…, м•„л‘җмқҙл…ё, м§җлІҢ, MPU-6050, мһҗмқҙлЎң к°ҖмҶҚлҸ„, м„ңліҙлӘЁн„°, MG996R, Arduino, NANO,
Written By
л¶Җн’Ҳкө¬мһ… 2. кё°кө¬м¶ңл Ҙ3. н”„лЎңк·ёлһЁл°Қ 4. н…ҢмҠӨнҠё 5. мҡ©мҡ© л°Ҹ кі лҸ„нҷ” Arduino nane нҳёнҷҳліҙл“ң FT232RL мһҗмқҙлЎң м„јм„ң м—°кІ° MPU-6050 м„ңліҙлӘЁн„° лӢЁмһҗ м„ңліҙ лӘЁн„° м—°кІ° (MG996R) кІ°м„ 1 (м„ңліҙлӘЁн„° м „мӣҗ ) кІ°м...
1. лӢӨмҡҙлЎңл“ң - 1. м•„лһҳ л§ҒнҒ¬ нҺҳмқҙм§ҖлЎң мқҙлҸҷн•ң нӣ„ "DOWNLOADS"лҘј нҒҙлҰӯн•©лӢҲлӢӨ. "SOFTWARE -> DOWNLOARDS" URL: https://www.arduino.cc/ - 2. "Windows Installer, for Windows 7 and up" мқ„ нҒҙлҰӯн•©лӢҲлӢӨ. вҖ“ к°Ғ OSлі„лЎ...