1. Collision
1. 충лҸҢ
Have you ever been in a car accident? What did you collide with? Just like with cars, PhysicBody objects can come in contact.
көҗнҶө мӮ¬кі лҘј лӢ№н•ҳмӢ м Ғмқҙ мһҲмҠөлӢҲк№Ң? л¬ҙм—Үкіј 충лҸҢ н–ҲмҠөлӢҲк№Ң? мһҗлҸҷм°ЁмҷҖ л§Ҳм°¬к°Җм§ҖлЎң л¬јлҰ¬м Ғ мқё л¬јмІҙлҸ„ м ‘мҙү н• мҲҳ мһҲмҠөлӢҲлӢӨ.
Collisions are what happens when PhysicBody objects come in contact with each other.
충лҸҢмқҖ л¬јлҰ¬м Ғ мқё л¬јмІҙк°Җ м„ңлЎң м ‘мҙү н• л•Ң мқјм–ҙлӮҳлҠ” мқјмһ…лӢҲлӢӨ.
When a collision takes place it can be ignored or it can trigger events to be fired.
충лҸҢмқҙ л°ңмғқн•ҳл©ҙ л¬ҙмӢңн•ҳкұ°лӮҳ мқҙлІӨнҠёлҘј л°ңмғқмӢңнӮ¬ мҲҳ мһҲмҠөлӢҲлӢӨ.
2. Filtering Collisions
3. 충лҸҢ н•„н„°л§Ғ
Collision filtering allows you to enable or prevent collisions between shapes.
충лҸҢ н•„н„°л§Ғмқ„ мӮ¬мҡ©н•ҳл©ҙ лӘЁм–‘ к°„мқҳ 충лҸҢмқ„ нҷңм„ұнҷ”н•ҳкұ°лӮҳ л°©м§Җ н• мҲҳ мһҲмҠөлӢҲлӢӨ.
This physics engine supports collision filtering using category and group bitmasks.
мқҙ л¬јлҰ¬ 엔진мқҖ м№ҙн…Ңкі лҰ¬ л°Ҹ к·ёлЈ№ 비нҠё л§ҲмҠӨнҒ¬лҘј мӮ¬мҡ©н•ң 충лҸҢ н•„н„°л§Ғмқ„ м§Җмӣҗн•©лӢҲлӢӨ.
There are 32 supported collision categories.
м§ҖмӣҗлҗҳлҠ” 충лҸҢ лІ”мЈјлҠ” 32 к°ңмһ…лӢҲлӢӨ.
For each shape you can specify which category it belongs to.
к°Ғ лҸ„нҳ•м—җ лҢҖн•ҙ м–ҙл–Ө м№ҙн…Ңкі лҰ¬м—җ мҶҚн•ҳлҠ”м§Җ м§Җм •н• мҲҳ мһҲмҠөлӢҲлӢӨ.
You can also specify what other categories this shape can collide with.
мқҙ лӘЁм–‘мқҙ 충лҸҢ н• мҲҳмһҲлҠ” лӢӨлҘё лІ”мЈјлҘј м§Җм •н• мҲҳлҸ„ мһҲмҠөлӢҲлӢӨ.
This is done with masking bits.
мқҙкІғмқҖ л§ҲмҠӨнӮ№ 비нҠёлЎң мҲҳн–үлҗ©лӢҲлӢӨ.
For example:
auto visibleSize = Director::getInstance()->getVisibleSize();
s_centre = Vec2(visibleSize.width/2, visibleSize.height/2);
auto sprite1 = addSpriteAtPosition(Vec2(s_centre.x - 150,s_centre.y));
sprite1->getPhysicsBody()->setCategoryBitmask(0x02); // 0010
sprite1->getPhysicsBody()->setCollisionBitmask(0x01); // 0001
sprite1 = addSpriteAtPosition(Vec2(s_centre.x - 150,s_centre.y + 100));
sprite1->getPhysicsBody()->setCategoryBitmask(0x02); // 0010
sprite1->getPhysicsBody()->setCollisionBitmask(0x01); // 0001
auto sprite2 = addSpriteAtPosition(Vec2(s_centre.x + 150,s_centre.y),1);
sprite2->getPhysicsBody()->setCategoryBitmask(0x01); // 0001
sprite2->getPhysicsBody()->setCollisionBitmask(0x02); // 0010
auto sprite3 = addSpriteAtPosition(Vec2(s_centre.x + 150,s_centre.y + 100),2);
sprite3->getPhysicsBody()->setCategoryBitmask(0x03); // 0011
sprite3->getPhysicsBody()->setCollisionBitmask(0x03); // 0011
You can check for collisions by checking and comparing category and collision bitmasks like:
лӢӨмқҢкіј к°ҷмқҖ м№ҙн…Ңкі лҰ¬ л°Ҹ 충лҸҢ 비нҠё л§ҲмҠӨнҒ¬лҘј нҷ•мқён•ҳкі л№„көҗн•ҳм—¬ 충лҸҢмқ„ нҷ•мқён• мҲҳ мһҲмҠөлӢҲлӢӨ.
if ((shapeA->getCategoryBitmask() & shapeB->getCollisionBitmask()) == 0
|| (shapeB->getCategoryBitmask() & shapeA->getCollisionBitmask()) == 0)
{
// shapes can't collide
ret = false;
}
Collision groups let you specify an integral group index.
충лҸҢ к·ёлЈ№мқ„ мӮ¬мҡ©н•ҳл©ҙ нҶөн•© к·ёлЈ№ мқёлҚұмҠӨлҘј м§Җм •н• мҲҳ мһҲмҠөлӢҲлӢӨ.
You can have all shapes with the same group index always collide (positive index) or never collide (negative index and zero index).
лҸҷмқјн•ң к·ёлЈ№ мқёлҚұмҠӨлҘј к°Җ진 лӘЁл“ м…°мқҙн”„к°Җ н•ӯмғҒ 충лҸҢ (м–‘мҲҳ мқёлҚұмҠӨ)н•ҳкұ°лӮҳ м ҲлҢҖ 충лҸҢ (мқҢмҲҳ мқёлҚұмҠӨ л°Ҹ 0 мқёлҚұмҠӨ)н•ҳлҸ„лЎқ н• мҲҳ мһҲмҠөлӢҲлӢӨ.
Collisions between shapes of different group indices are filtered according the category and mask bits.
м„ңлЎң лӢӨлҘё к·ёлЈ№ мқёлҚұмҠӨмқҳ лӘЁм–‘ к°„мқҳ 충лҸҢмқҖ лІ”мЈј л°Ҹ л§ҲмҠӨнҒ¬ 비нҠём—җ л”°лқј н•„н„°л§Ғлҗ©лӢҲлӢӨ.
In other words, group filtering has higher precedence than category filtering.
мҰү, к·ёлЈ№ н•„н„°л§ҒмқҖ лІ”мЈј н•„н„°л§ҒліҙлӢӨ мҡ°м„ мҲңмң„к°Җ лҶ’мҠөлӢҲлӢӨ.
3. Contacts/Joints
3. м ‘м җ / мЎ°мқёнҠё
Recall from the terminology above that joints are how contact points are connected to each other.
мң„мқҳ мҡ©м–ҙм—җм„ң кҙҖм ҲмқҖ м ‘м җмқҙ м„ңлЎң м—°кІ°лҗҳлҠ” л°©мӢқмқҙлқјлҠ” кІғмқ„ кё°м–өн•ҳмӢӯмӢңмҳӨ.
Yes, you can think of it just like joints on your own body.
мҳҲ, лӢ№мӢ мқҖ мһҗмӢ мқҳ лӘём—җмһҲлҠ” кҙҖм ҲмІҳлҹј мғқк°Ғн• мҲҳ мһҲмҠөлӢҲлӢӨ.
Each joint type has a definition that derives from PhysicsJoint.
к°Ғ кҙҖм Ҳ мң нҳ•м—җлҠ” л¬јлҰ¬ кҙҖм Ҳм—җм„ң нҢҢмғқ лҗң м •мқҳк°Җ мһҲмҠөлӢҲлӢӨ.
All joints are connected between two different bodies.
лӘЁл“ кҙҖм ҲмқҖ м„ңлЎң лӢӨлҘё л‘җ лӘёмІҙ мӮ¬мқҙм—җ м—°кІ°лҗ©лӢҲлӢӨ.
One body may be static.
н•ң лӘёмқҖ м •м Ғ мқј мҲҳ мһҲмҠөлӢҲлӢӨ.
You can prevent the attached bodies from colliding with each other by joint->setCollisionEnable(false).
joint-> setCollisionEnable (false)лЎң л¶Җм°© лҗң л°”л””к°Җ м„ңлЎң 충лҸҢн•ҳлҠ” кІғмқ„ л°©м§Җ н• мҲҳ мһҲмҠөлӢҲлӢӨ.
Many joint definitions require that you provide some geometric data.
л§ҺмқҖ м ‘н•© м •мқҳм—җм„ңлҠ” мқјл¶Җ кё°н•ҳн•ҷм Ғ лҚ°мқҙн„°лҘј м ңкіөн•ҙм•јн•©лӢҲлӢӨ.
Often a joint will be defined by anchor points.
мў…мў… мЎ°мқёнҠёлҠ” м•өм»Ө нҸ¬мқёнҠёлЎң м •мқҳлҗ©лӢҲлӢӨ.
The rest of the joint definition data depends on the joint type.
лӮҳлЁём§Җ мЎ°мқёнҠё м •мқҳ лҚ°мқҙн„°лҠ” мЎ°мқёнҠё мң нҳ•м—җ л”°лқј лӢӨлҰ…лӢҲлӢӨ.
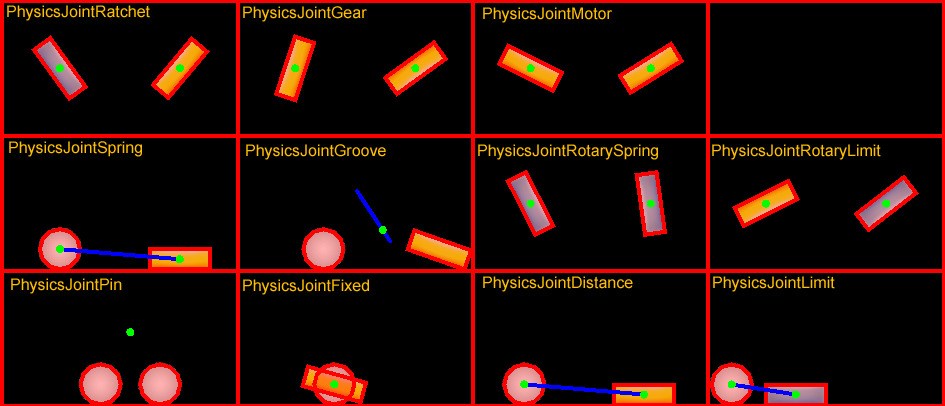
-PhysicsJointFixed: A fixed joint fuses the two bodies together at a reference point.
кі м • мЎ°мқёнҠёлҠ” кё°мӨҖм җм—җм„ң л‘җ ліёмІҙлҘј кІ°н•©н•©лӢҲлӢӨ.
Fixed joints are useful for creating complex shapes that can be broken apart later.
кі м • кҙҖм ҲмқҖ лӮҳмӨ‘м—җ 분лҰ¬ н• мҲҳмһҲлҠ” ліөмһЎн•ң лӘЁм–‘мқ„ л§Ңл“ңлҠ” лҚ° мң мҡ©н•©лӢҲлӢӨ.
-PhysicsJointLimit: A limit joint imposes a maximum distance between the two bodies, as if they were connected by a rope.
м ңн•ң мЎ°мқёнҠёлҠ” л§Ҳм№ҳ лЎңн”„лЎң м—°кІ°лҗң кІғмІҳлҹј л‘җ ліёмІҙ мӮ¬мқҙм—җ мөңлҢҖ кұ°лҰ¬лҘј л¶Җкіјн•©лӢҲлӢӨ.
-PhysicsJointPin: A pin joint allows the two bodies to independently rotate around the anchor point as if pinned together.
н•Җ мЎ°мқёнҠёлҘј мӮ¬мҡ©н•ҳл©ҙ л‘җ ліёмІҙк°Җ л§Ҳм№ҳ н•Ёк»ҳ кі м • лҗң кІғмІҳлҹј м•өм»Ө нҸ¬мқёнҠёлҘј мӨ‘мӢ¬мңјлЎң лҸ…лҰҪм ҒмңјлЎң нҡҢм „ н• мҲҳ мһҲмҠөлӢҲлӢӨ.
-PhysicsJointDistance: Set the fixed distance with two bodies
л‘җ лӘёмІҙлЎң кі м • кұ°лҰ¬ м„Өм •
-PhysicsJointSpring: Connecting two physics bodies together with a spring
л‘җ к°ңмқҳ л¬јлҰ¬ лӘёмІҙлҘј мҠӨн”„л§ҒмңјлЎң м—°кІ°
-PhysicsJointGroove: Attach body a to a line, and attach body b to a dot
ліёл¬ё aлҘј м„ м—җ м—°кІ°н•ҳкі ліёл¬ё bлҘј м җм—җ м—°кІ°
-PhysicsJointRotarySpring: Likes a spring joint, but works with rotary
мҠӨн”„л§Ғ мЎ°мқёнҠёлҘј мўӢм•„н•ҳм§Җл§Ң лЎңн„°лҰ¬мҷҖ н•Ёк»ҳ мһ‘лҸҷн•©лӢҲлӢӨ.
-PhysicsJointRotaryLimit: Likes a limit joint, but works with rotary
лҰ¬лҜёнҠё мЎ°мқёнҠёлҘј мўӢм•„н•ҳм§Җл§Ң лЎңн„°лҰ¬мҷҖ н•Ёк»ҳ мһ‘лҸҷн•©лӢҲлӢӨ.
-PhysicsJointRatchet: Works like a socket wrench
мҶҢмј“ л Ңм№ҳмІҳлҹј мһ‘лҸҷ
-PhysicsJointGear: Keeps the angular velocity ratio of a pair of bodies constant
н•ң мҢҚмқҳ лӘёмІҙмқҳ к°ҒмҶҚлҸ„ 비мңЁмқ„ мқјм •н•ҳкІҢ мң м§Җн•©лӢҲлӢӨ.
-PhysicsJointMotor: Keeps the relative angular velocity of a pair of bodies constant
н•ң мҢҚмқҳ лӘёмІҙмқҳ мғҒлҢҖ к°ҒмҶҚлҸ„лҘј мқјм •н•ҳкІҢ мң м§Җн•©лӢҲлӢӨ.
4. Collision detection
4. 충лҸҢ к°җм§Җ
Contacts are objects created by the physics engine to manage the collision between two shapes.
м ‘мҙүмқҖ л‘җ лӘЁм–‘ к°„мқҳ 충лҸҢмқ„ кҙҖлҰ¬н•ҳкё° мң„н•ҙ л¬јлҰ¬ 엔진м—җ мқҳн•ҙ мғқм„ұ лҗң к°қмІҙмһ…лӢҲлӢӨ.
Contact objects are not created by the user, they are created automatically.
м—°лқҪмІҳ к°ңмІҙлҠ” мӮ¬мҡ©мһҗк°Җ л§Ңл“Өм§Җ м•Ҡкі мһҗлҸҷмңјлЎң л§Ңл“Өм–ҙ집лӢҲлӢӨ.
There are a few terms associated with contacts.
м—°лқҪмІҳмҷҖ кҙҖл Ёлҗң лӘҮ к°Җм§Җ мҡ©м–ҙк°Җ мһҲмҠөлӢҲлӢӨ.
-contact point: A contact point is a point where two shapes touch.
м ‘м җмқҖ л‘җ лҸ„нҳ•мқҙ л§ҢлӮҳлҠ” м§Җм җмһ…лӢҲлӢӨ.
-contact normal: A contact normal is a unit vector that points from one shape to another.
м ‘мҙү лІ•м„ мқҖ н•ң лӘЁм–‘м—җм„ң лӢӨлҘё лӘЁм–‘мқ„ к°ҖлҰ¬нӮӨлҠ” лӢЁмң„ лІЎн„°мһ…лӢҲлӢӨ.
You can get the PhysicsShape from a contact.
м—°лқҪмІҳм—җм„ң л¬јлҰ¬м Ғ лӘЁм–‘мқ„ м–»мқ„ мҲҳ мһҲмҠөлӢҲлӢӨ.
From those you can get the bodies.
к·ёл“ӨлЎңл¶Җн„° лӢ№мӢ мқҖ л¬јмІҙлҘј м–»мқ„ мҲҳ мһҲмҠөлӢҲлӢӨ.
bool onContactBegin(PhysicsContact& contact)
{
auto bodyA = contact.getShapeA()->getBody();
auto bodyB = contact.getShapeB()->getBody();
return true;
}
You can get access to contacts by implementing a contact listener.
м—°лқҪмІҳ лҰ¬мҠӨл„ҲлҘј кө¬нҳ„н•ҳм—¬ м—°лқҪмІҳм—җ м•Ўм„ёмҠӨ н• мҲҳ мһҲмҠөлӢҲлӢӨ.
The contact listener supports several events: begin, pre-solve, post-solve and separate.
м»Ёнғқ лҰ¬мҠӨл„ҲлҠ” мӢңмһ‘, мӮ¬м „ н•ҙкІ°, мӮ¬нӣ„ н•ҙкІ° л°Ҹ 분лҰ¬мҷҖ к°ҷмқҖ м—¬лҹ¬ мқҙлІӨнҠёлҘј м§Җмӣҗн•©лӢҲлӢӨ.
-begin: Two shapes just started touching for the first time this step.
мқҙ лӢЁкі„м—җм„ң мІҳмқҢмңјлЎң л‘җ к°ңмқҳ лӘЁм–‘мқҙ л§ҢлӮҳкё° мӢңмһ‘н–ҲмҠөлӢҲлӢӨ.
Return true from the callback to process the collision normally or false to cause physics engine to ignore the collision entirely.
мҪңл°ұм—җм„ң trueлҘј л°ҳнҷҳн•ҳм—¬ 충лҸҢмқ„ м •мғҒм ҒмңјлЎң мІҳлҰ¬н•ҳкұ°лӮҳ falseлҘј л°ҳнҷҳн•ҳм—¬ л¬јлҰ¬ 엔진мқҙ 충лҸҢмқ„ мҷ„м „нһҲ л¬ҙмӢңн•ҳлҸ„лЎқн•©лӢҲлӢӨ.
If you return false, the preSolve() and postSolve() callbacks will never be run, but you will still receive a separate event when the shapes stop overlapping.
falseлҘј л°ҳнҷҳн•ҳл©ҙ pre solve () л°Ҹ post solve () мҪңл°ұмқҙ мӢӨн–үлҗҳм§Җ м•Ҡм§Җл§Ң м…°мқҙн”„к°Җ кІ№м№ҳм§Җ м•Ҡмңјл©ҙ лі„лҸ„мқҳ мқҙлІӨнҠёк°Җ кі„мҶҚ мҲҳмӢ лҗ©лӢҲлӢӨ.
-pre-solve: Two shapes are touching during this step.
мқҙ лӢЁкі„м—җм„ң л‘җ к°ңмқҳ лӘЁм–‘мқҙ м ‘мҙүн•©лӢҲлӢӨ.
Return false from the callback to make physics engine ignore the collision this step or true to process it normally.
мҪңл°ұм—җм„ң falseлҘј л°ҳнҷҳн•ҳм—¬ л¬јлҰ¬ 엔진мқҙмқҙ лӢЁкі„м—җм„ң 충лҸҢмқ„ л¬ҙмӢңн•ҳлҸ„лЎқн•ҳкұ°лӮҳ м •мғҒм ҒмңјлЎң мІҳлҰ¬н•ҳл Өл©ҙ trueлҘј л°ҳнҷҳн•©лӢҲлӢӨ.
Additionally, you may override collision values using setRestitution(), setFriction() or setSurfaceVelocity() to provide custom restitution, friction, or surface velocity values.
추к°ҖлЎң, set restitution ()мқ„ мӮ¬мҡ©н•ҳм—¬ 충лҸҢ к°’мқ„ мһ¬м •мқҳн•ҳкұ°лӮҳ, л§Ҳм°° ()мқ„ м„Өм •н•ҳкұ°лӮҳ, н‘ңл©ҙ мҶҚлҸ„ ()лҘј м„Өм •н•ҳм—¬ мӮ¬мҡ©мһҗ м§Җм • ліөмӣҗ, л§Ҳм°° лҳҗлҠ” н‘ңл©ҙ мҶҚлҸ„ к°’мқ„ м ңкіө н• мҲҳ мһҲмҠөлӢҲлӢӨ.
-post-solve: Two shapes are touching and their collision response has been processed.
л‘җ лӘЁм–‘мқҙ м ‘мҙүн•ҳкі м¶©лҸҢ мқ‘лӢөмқҙ мІҳлҰ¬лҗҳм—ҲмҠөлӢҲлӢӨ.
-separate: Two shapes have just stopped touching for the first time this step.
мқҙ лӢЁкі„м—җм„ң мІҳмқҢмңјлЎң л‘җ к°ңмқҳ лӘЁм–‘мқҙ н„°м№ҳлҘј л©Ҳм·„мҠөлӢҲлӢӨ.
You also can use EventListenerPhysicsContactWithBodies, EventListenerPhysicsContactWithShapes, EventListenerPhysicsContactWithGroup to listen for the event you’re interested with bodies, shapes or groups.
лҳҗн•ң л°”л””мҷҖмқҳ мқҙлІӨнҠё лҰ¬мҠӨл„Ҳ л¬јлҰ¬ м ‘мҙү, лӘЁм–‘кіјмқҳ мқҙлІӨнҠё лҰ¬мҠӨл„Ҳ л¬јлҰ¬ м ‘мҙү, к·ёлЈ№кіјмқҳ мқҙлІӨнҠё лҰ¬мҠӨл„Ҳ л¬јлҰ¬ м ‘мҙүмқ„ мӮ¬мҡ©н•ҳм—¬ л°”л””, лӘЁм–‘ лҳҗлҠ” к·ёлЈ№м—җ кҙҖмӢ¬мқҙмһҲлҠ” мқҙлІӨнҠёлҘј мҲҳмӢ н• мҲҳ мһҲмҠөлӢҲлӢӨ.
Besides this you also need to set the physics contact related bitmask value, as the contact event won’t be received by default, even if you create the relative EventListener.
мқҙ мҷём—җлҸ„ мғҒлҢҖ мқҙлІӨнҠё лҰ¬мҠӨл„ҲлҘј мғқм„ұн•ҳлҚ”лқјлҸ„ кё°ліём ҒмңјлЎң м ‘мҙү мқҙлІӨнҠёк°Җ мҲҳмӢ лҗҳм§Җ м•ҠмңјлҜҖлЎң л¬јлҰ¬ м ‘мҙү кҙҖл Ё 비нҠё л§ҲмҠӨнҒ¬ к°’лҸ„ м„Өм •н•ҙм•јн•©лӢҲлӢӨ.
For example:
bool init()
{
auto visibleSize = Director::getInstance()->getVisibleSize();
s_centre = Vec2(visibleSize.width/2, visibleSize.height/2);
//create a static PhysicsBody
// м •м Ғ мқё л¬јлҰ¬ лӘёмІҙ мғқм„ұ
auto sprite = addSpriteAtPosition(s_centre, 1);
sprite->setTag(10);
sprite->getPhysicsBody()->setContactTestBitmask(0xFFFFFFFF);
sprite->getPhysicsBody()->setDynamic(false);
//adds contact event listener
// м ‘мҙү мқҙлІӨнҠё лҰ¬мҠӨл„Ҳ 추к°Җ
auto contactListener = EventListenerPhysicsContact::create();
contactListener->onContactBegin = CC_CALLBACK_1(PhysicsDemoCollisionProcessing::onContactBegin, this);
_eventDispatcher->addEventListenerWithSceneGraphPriority(contactListener, this);
schedule(CC_SCHEDULE_SELECTOR(PhysicsDemoCollisionProcessing::tick), 0.3f);
return true;
return false;
}
void tick(float dt)
{
auto sprite1 = addSpriteAtPosition(Vec2(s_centre.x + cocos2d::random(-300,300),
s_centre.y + cocos2d::random(-300,300)));
auto physicsBody = sprite1->getPhysicsBody();
physicsBody->setVelocity(Vec2(cocos2d::random(-500,500),cocos2d::random(-500,500)));
physicsBody->setContactTestBitmask(0xFFFFFFFF);
}
bool onContactBegin(PhysicsContact& contact)
{
auto nodeA = contact.getShapeA()->getBody()->getNode();
auto nodeB = contact.getShapeB()->getBody()->getNode();
if (nodeA && nodeB)
{
if (nodeA->getTag() == 10)
{
nodeB->removeFromParentAndCleanup(true);
}
else if (nodeB->getTag() == 10)
{
nodeA->removeFromParentAndCleanup(true);
}
}
//bodies can collide
// лӘёмқҙ 충лҸҢ н• мҲҳ мһҲмқҢ
return true;
}